{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

General description:
General description:
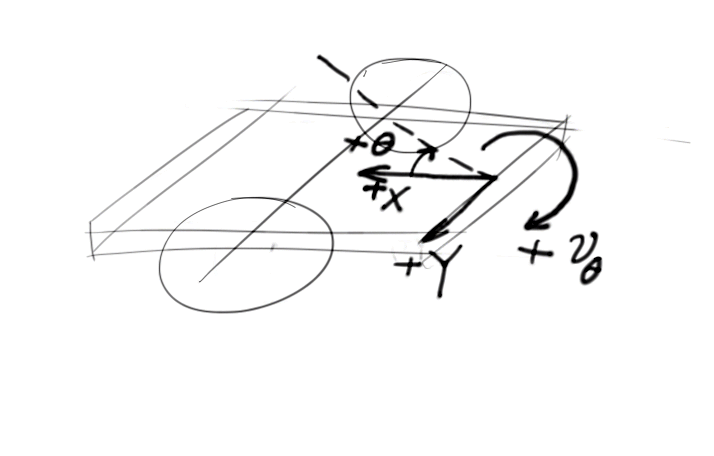
DC motors' speed and direction of rotation are controlled by measuring platform pitch angle to maintain balance and provide drive in forward and backward directions. Tilting the steering handle left and right is read by a potentimeter and will cause a speed difference to left and right side motors to enable turning. Scooter balances itself before the driver gets on board.
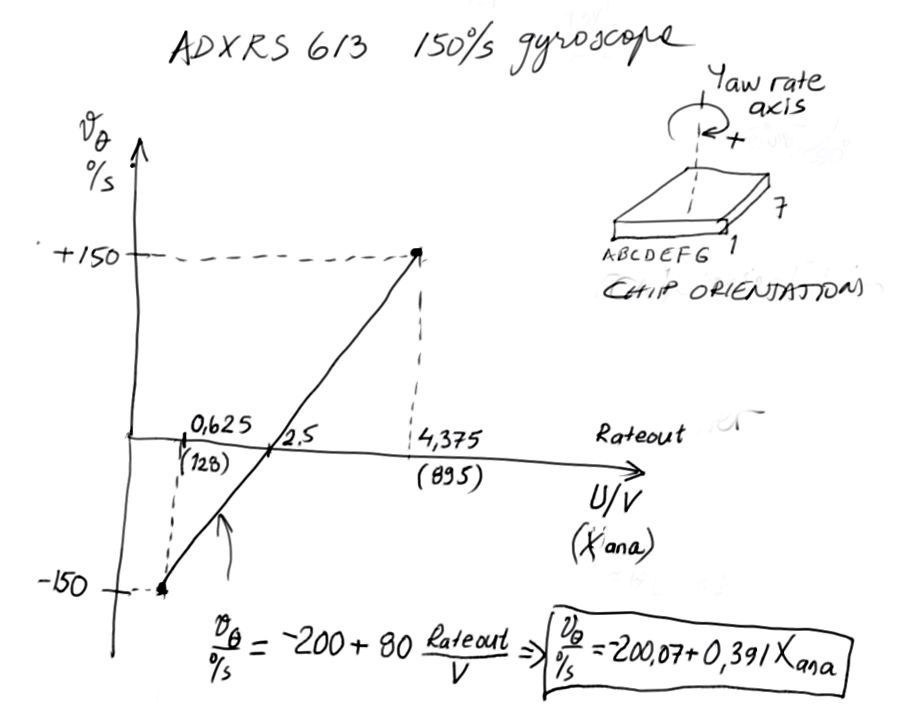
To determine how much platform is tilted from the horizontal plane, both the angle (in degrees) and anglular velocity (degrees per second) are measured. By combining these measurements and filtering, the resulting calculated angle and anglar velocity are used in conjuction with proportional and derivative terms to calculate the motor setpoints.
Hardware:
Software: Compiled with HITECH C
Documents:
Connection diagram
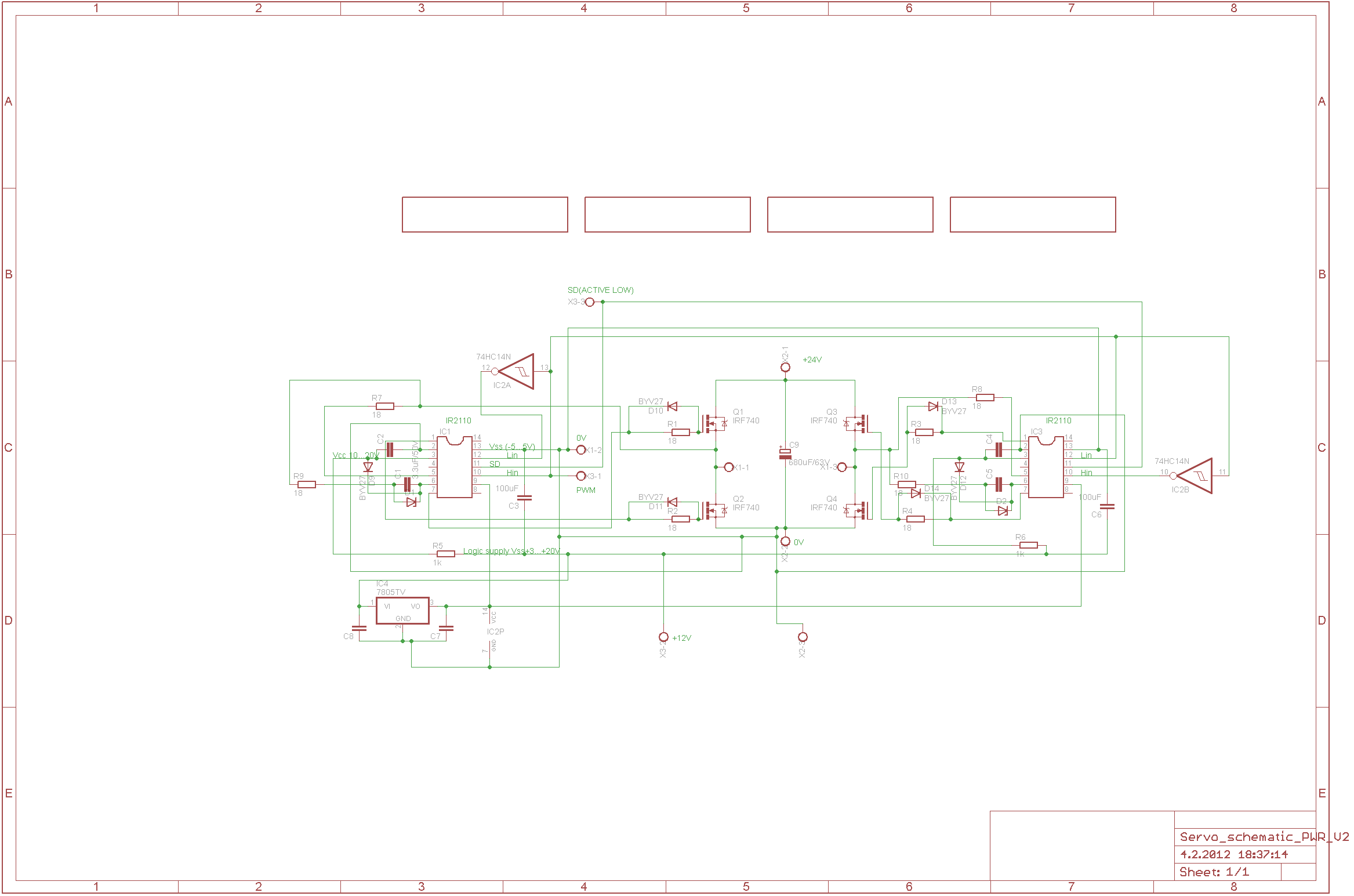
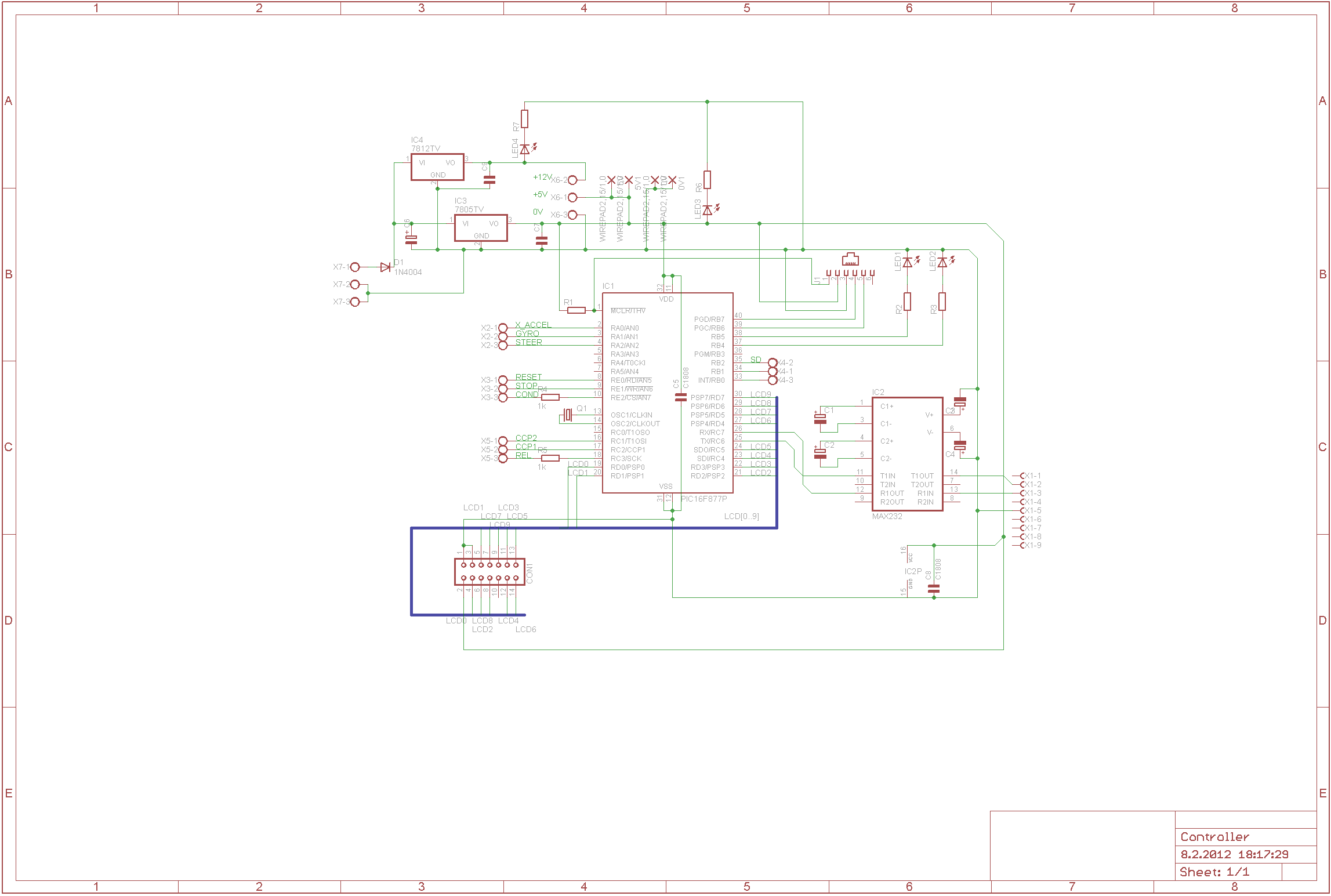
Schematics
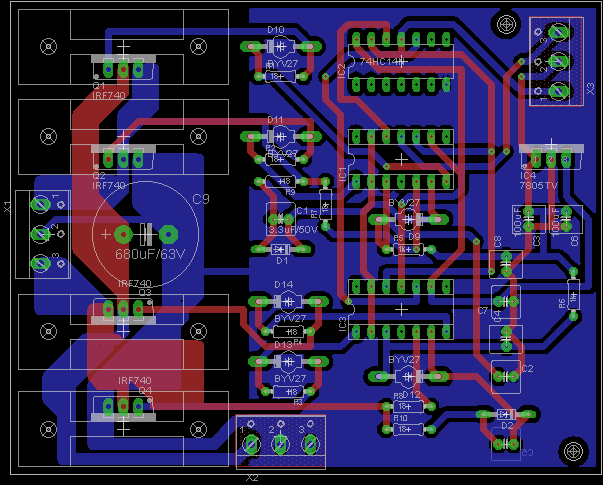
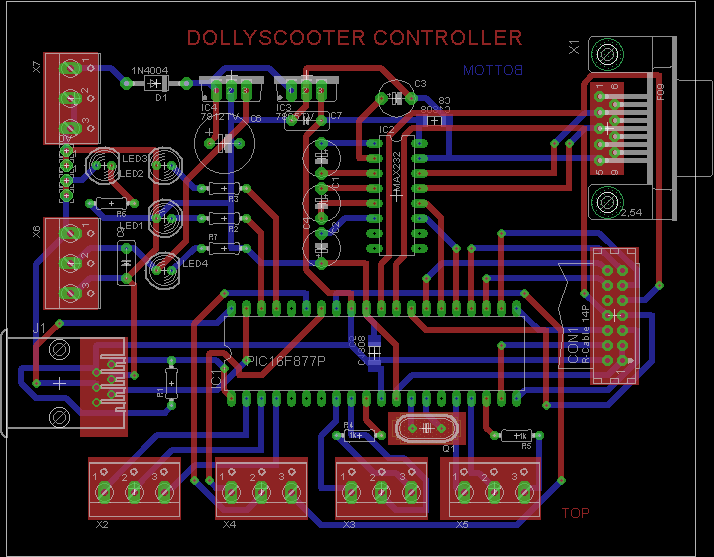
PCB's
Photos
Lab notes
Parts list
